Vision-based Intention and Trajectory Prediction in Autonomous Vehicles: A Survey
Abstract
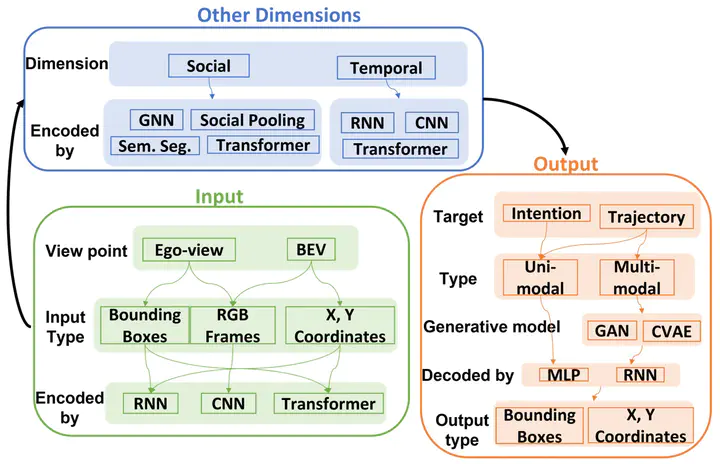
This survey targets intention and trajectory prediction in Autonomous Vehicles (AV), as AV companies compete to create dedicated prediction pipelines to avoid collisions. The survey starts with a formal definition of the prediction problem and highlights its challenges, to then critically compare the models proposed in the last 2-3 years in terms of how they overcome these challenges. Further, it lists the latest methodological and technical trends in the field and comments on the efficacy of different machine learning blocks in modelling various aspects of the prediction problem. It also summarises the popular datasets and metrics used to evaluate prediction models, before concluding with the possible research gaps and future directions.
Izzeddin Teeti
PhD Student in Computer Vision and Machine Learning
My research interests include Continual Learning, Vision Transformers, Autonomous Driving.