Abstract
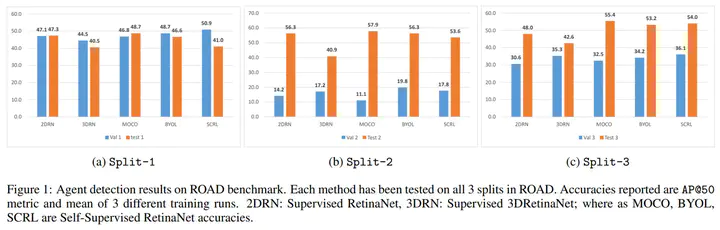
The detection of road agents, such as vehicles and pedestrians are central in autonomous driving. Self-Supervised Learning (SSL) has been proven to be an effective technique for learning discrimi-native feature representations for image classification , alleviating the need for labels, a remarkable advancement considering how time-consuming and expensive labelling can be in autonomous driving. In this paper, we investigate the effectiveness of contrastive SSL techniques such as BYOL and MoCo on the object (agent) detection task using the ROad event Awareness Dataset (ROAD). Our experiments show that using self-supervised learning we can achieve a 3.96% improvement on the AP@50 metric for agent detection compared to supervised pretraining. Extensive comparisons and evaluations of current state-of-the-art SSL methods (namely MOCO, BYOL, SCRL) are conducted and reported for the object detection task.
Izzeddin Teeti
PhD Student in Computer Vision and Machine Learning
My research interests include Continual Learning, Vision Transformers, Autonomous Driving.